


Konstrukcja robotów MiniSUMO
Opiekun: mgr inż. Kamil Wyrąbkiewicz
Roboty mobilne to urządzenia elektroniczne, które mogą poruszać się w terenie. Do tego celu potrzebują m.in. układu napędowego, systemu sensorycznego. Za zarządzanie informacjami z poszczególnych podsystemów odpowiedzialna jest jednostka mikroprocesorowa, która umożliwia implementacje i wykonywanie obliczeń dla metod wspomagających podejmowanie decyzji.
Roboty mobilne jest to grupa robotów, która dzieli się na roboty sterowane oraz roboty autonomiczne. Autonomiczne roboty mobilne różnią się od zdanie sterowanych tym, że decyzje o jego zachowaniu – ruch, przemieszczenie lub wykonywanie zadanej czynności wykonuje sam na podstawie informacji z podsystemów sensorycznych.
Roboty autonomiczne są konstruowane do różnych celów m. in. do celów medycznych oraz wojskowych. Istnieją również zawody w których na wzór konkurencji sportowych prowadzi się rozgrywki dla robotów. Jedną z konkurencji jest Linefollower - jest to konkurencja, która została utworzona na wzór formuły 1. Istnieje również klasa konkurencji dla robotów walczących. Roboty takie stają na okrągłym ringu do walki na wzór japońskich walk SUMO.
Głównym celem zajęć było budowanie robotów mobilnych. Słuchacze zapoznali się z podstawowymi elementami konstrukcyjnymi robota, m.in. źródłami zasilania, mikrokontrolerami oraz układami napędowymi.
Zajęcia zostały podzielone na dwie zasadnicze części. Pierwsza teoretyczna, to ta część zajęć, w której omówiono wszystkie niezbędne aspekty pracy z układami elektronicznymi potrzebnymi do budowy robotów klasy miniSUMO.
W drugiej części zdobytą wiedzę teoretyczna wykorzystano do utworzenia projektu elektroniki robota mobilnego miniSUMO. W tym celu wykonano własne biblioteki każdego niezbędnego elementu potrzebnego na potrzeby projektu. Z utworzonej biblioteki elementów utworzono schemat elektryczny robota mobilnego. Następnie na podstawie schematu elektrycznego utworzono projekt obwodu drukowanego wykonanego w technologii jednowarstwowej. Słuchacze zapoznali się z techniką wytrawiania płytek drukowanych PCB na zajęciach metodą termo-transferu.
Projekt:
Schemat elektryczny projektu zawierał m.in.:
- mikrokontroler ATmega16 jako główną jednostkę mikroprocesorową,
- układ napędowy TB6612 pozwalający podłączyć dwa silniki elektryczne,
- dwa cyfrowe optyczne czujniki odległości SHARP GP2Y0D340K
- dwa analogowe czujniki podczerwone białej linii.
Podczas zajęć na potrzeby projektu utworzono algorytm pracy robota mobilnego. Algorytm ten miał za zadanie koordynować pracę robota mobilnego w taki sposób aby sygnały wejściowe z czujników były interpretowane przez „maszynę stanów robota” i zostały wykonane odpowiednie akcję. Algorytm wykorzystuje wszystkie wyżej opisane kluczowe dla pracy robota układy.
Podczas zajęć słuchacze poznali podstawy języka programowania C. Dzięki niemu możliwa była implementacja opracowanego algorytmu do środowiska programistycznego AVRStudio a następnie sprawdzenie poprawności implementacji przy pomocy wbudowanego kompilatora.
Poniżej znajduje się galeria z wybranymi zdjęciami i rysunkami.
Rys.1. Prace projektowe nad schematem oraz obwodem drukowanym.
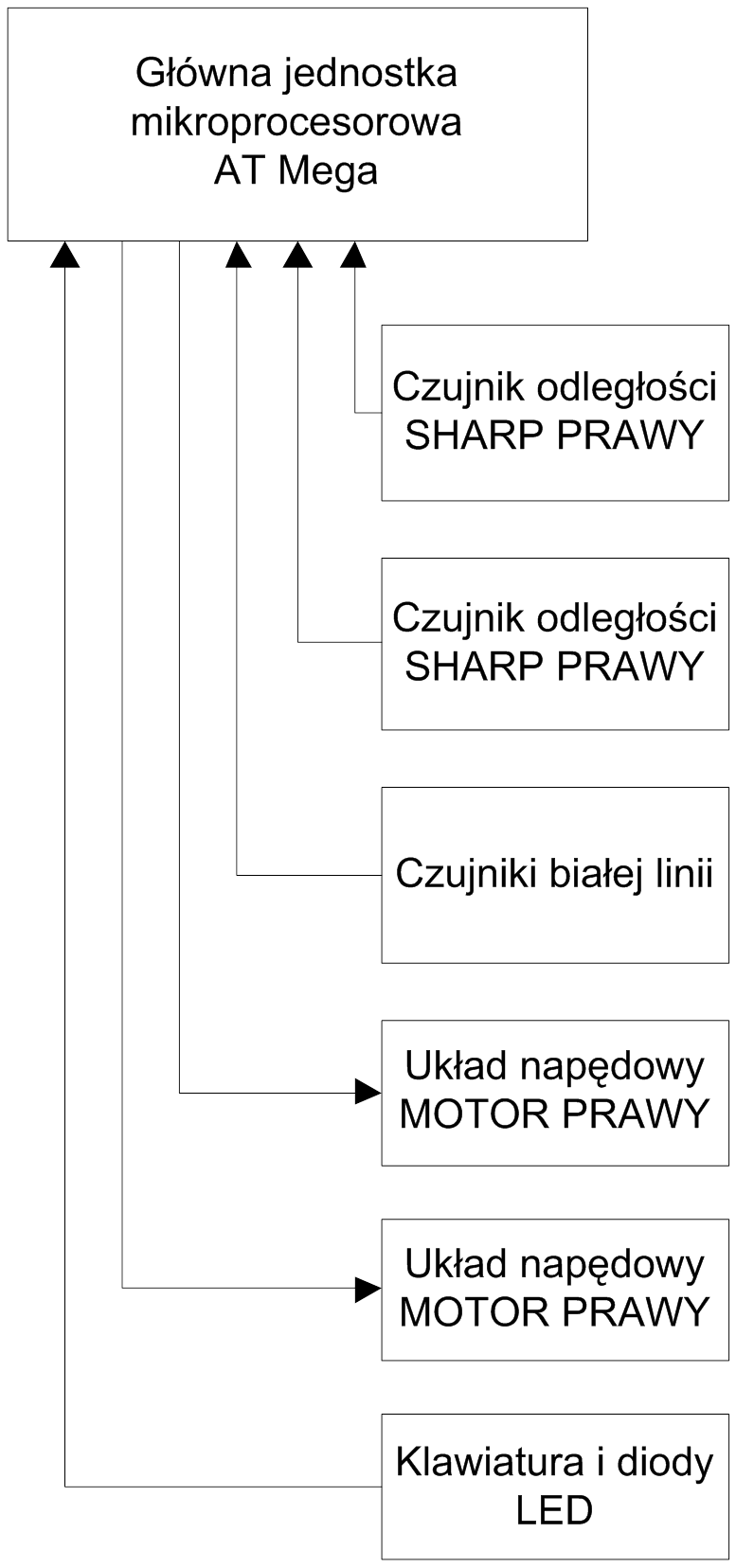
Rys.2. Elementy systemu mikroprocesorowego robota mobilnego.

Rys.3. Prace mechaniczne przygotowujące do trawienia obwodów elektrycznych PCB.

Rys.4. Programowanie algorytmu robota mobilnego w środowisku AVR Studio.

Rys.5. Implementowany algorytm robota mobilnego.

Projekt „Wszechstronność godna Kopernika" realizowany w ramach Priorytetu I, Działania 1.1, Poddziałania 1.1.3. Programu Operacyjnego Innowacyjna Gospodarka. Projekt współfinansowany przez Unię Europejską z Europejskiego Funduszu Rozwoju Regionalnego.
 English version
English version







